PRODUCTS INFORMATIONXYθステージ(アライメントステージ)
XYθステージ(アライメントステージ)PRODUCTS
電動アクチュエータを同一平面上に配置した超薄型ステージであり装置全体の低重心化が実現可能です。
動作原理
同一平面上に配置した3つのアクチュエータを各々動作させることにより、様々なテーブル動作が可能になります。

U軸を動作させると、テーブルはX方向へ移動します。

V、W軸を同一方向に同じ量を動作させると、テーブルはY方向へ移動します。

V、W軸を同一方向に同じ量を、そして同時にU軸を動作させると、テーブルは斜め方向へ移動します。

テーブル中心を旋回中心としてテーブルが回転(θ軸)している例です。

任意の点を旋回中心としてテーブルが回転(θ軸)している例です。
NAF3シリーズ Cタイプ
NAF3シリーズ CタイプはUVWの3軸アクチュエータとスライド部に中間プレートを上下2枚のプレートで挟み込む「予圧型ダブルスライド」構造を採用。
各プレートの間に多数のボールが配置され、スムーズな平面転がり運動を可能にしています。
薄型コンパクト・高剛性・高精度な位置決めが行えます。


NAF3シリーズ Dタイプ
予圧型ダブルスライドを使用しないタイプで、可動範囲が広く設けられます。
またステージ中央部に開口部を設けることが可能です。

NAF3シリーズの導入事例
- 半導体製造装置、検査装置
- LCD、PDP、ELパネル製造、検査装置
- スクリーン印刷、プリント基板印刷機
- 顕微鏡ステージ 他
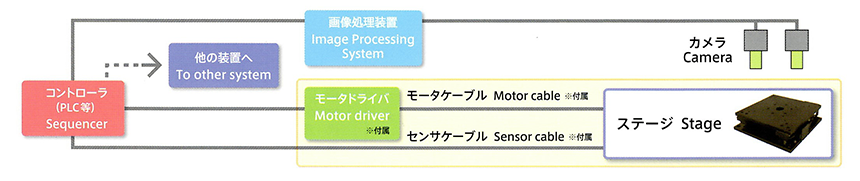
システム構成図
製品仕様
| 型式 | テーブルサイズ×高さ(原点時) | ストローク | 静止時負荷容量 | |
|---|---|---|---|---|
| NAF3C-10-01P | 100mm×100mm×35mm | XY±2mm・Θ±2° | 200N | 詳細ページへ |
| NAF3C-16K00 |
160mm×160mm×45mm | XY±5mm・Θ±3° | 1000N | 詳細ページへ |
| NAF3C-20K01 |
200mm×200mm×65mm | XY±5mm・Θ±3° | 2000N | 詳細ページへ |
| NAF3C-30K00 | 300mm×300mm×70mm | XY±5mm・Θ±3° | 4000N | 詳細ページへ |
| NAF3C-40K00 | 400mm×400mm×80mm | XY±5mm・Θ±3° | 6000N | 詳細ページへ |
| NAF3D-40K02 | 400mm×400mm×84.5mm | XY±5mm・Θ±3° | 6000N | 詳細ページへ |
※1 ステッピングモータ(型式 -P)または、サーボモータ(型式 -S)のいずれかを選択下さい。
※2 ストロークは、原点位置(トップテーブル中央時)から各軸同時にフルストローク動作させることが可能です。
※3 垂直方向等分布での負荷容量となります。搬送ステージ等に搭載される際は、上記の値は適用されません。
※4 ステッピングモータのドライバは、オープンコレクタ仕様となります。
※5 フォトマイクロセンサは各軸の駆動モジュールにそれぞれ3個づつ付いております。
型式構成
