PRODUCTS INFORMATION球面軸受 SRJ
球面軸受 採用事例PRODUCTS
早稲田大学 理工学術院 総合機械工学科 高西淳夫研究室
2足ヒューマノイドロボットWABIAN-2RIII
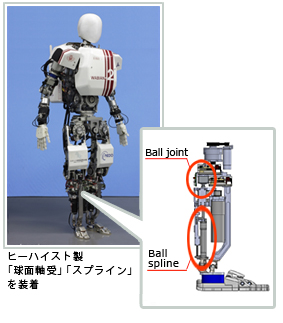
当社製品球面軸受とボールスプラインを用いて2足ヒューマノイドロボットWABIAN-2RIIIの下腿機構を開発。
人間の下腿と同等サイズの小型化を実現し、人間の歩行の特長である足角(爪先開き角)および狭い歩隔が 再現可能になりました。
本研究成果が、国際会議ICRA2013(The 2013 IEEE International Conference on Robotics and Automation)で発表され、記事が掲載されました。
人間搭載型2足歩行ロボットWL-16RIII

WL-16RIII(Waseda Leg-No.16 RefinedIII)は、30年以上わたる2足歩行ロボット開発の歴史を持つ早稲田大学とテムザックが協力し開発した、「人間搭乗型2足歩行ロボット」です。
WL-16RIIIは、屋内外の階段や斜面を移動できる高齢者・歩行障碍者害用の2足歩行型いすの実現のための基礎研究として開発が行われ、その研究内容は機構の設計からデバイスの開発、歩行安定化制御アルゴリズムの研究まで多岐にわたっています。
2003年にWL-16は2足歩行ロボットによる人間を乗せての歩行に世界で初めて成功。
2005年にはWL-16RIIは人間を乗せての階段昇降を世界で初めて公開。 2006年2月8日、WL-16RIIIは、人間を乗せての屋外不整路面における歩行に世界で初めて成功しています。
従来シリーズ軸付球面軸受(SRJ)
スキマゼロの転がり案内によって高剛性、高精度を実現!
- 高剛性、高精度
- 多自由度軸受の小型化
- チルト機構・水平出し機構への応用
- 超精密球面加工技術
ヒーハイストが開発した転がり球面軸受は高剛性、高精度を必要とするパラレルメカニズムにとって不可欠な要素機構です。 従来の滑りの球面軸受は大きな摩擦抵抗と内部隙間によって滑らかな動きに少なからず問題がありましたが、パラレルメカニズムを基本構造とする人間搭乗型2足歩行ロボットの足首にこの転がり球面軸受を装着することにより、スムーズな動作と耐久性を実現しました。